Byungchul Kim, Hyungmin Choi, Kyu Bum Kim, Sejin Jeong, Kyu-Jin Cho, “Exo-Glove Shell: A Hybrid Exo-Glove for the Thumb Opposition with an Under-Actuated Tendon-Driven System,” in preparation.
This research is accepted in Soft Robotics Journal. Please find our supplementary site for detailed information about this research
[Supplementary Site]. Below is an overview of this project.
Overview
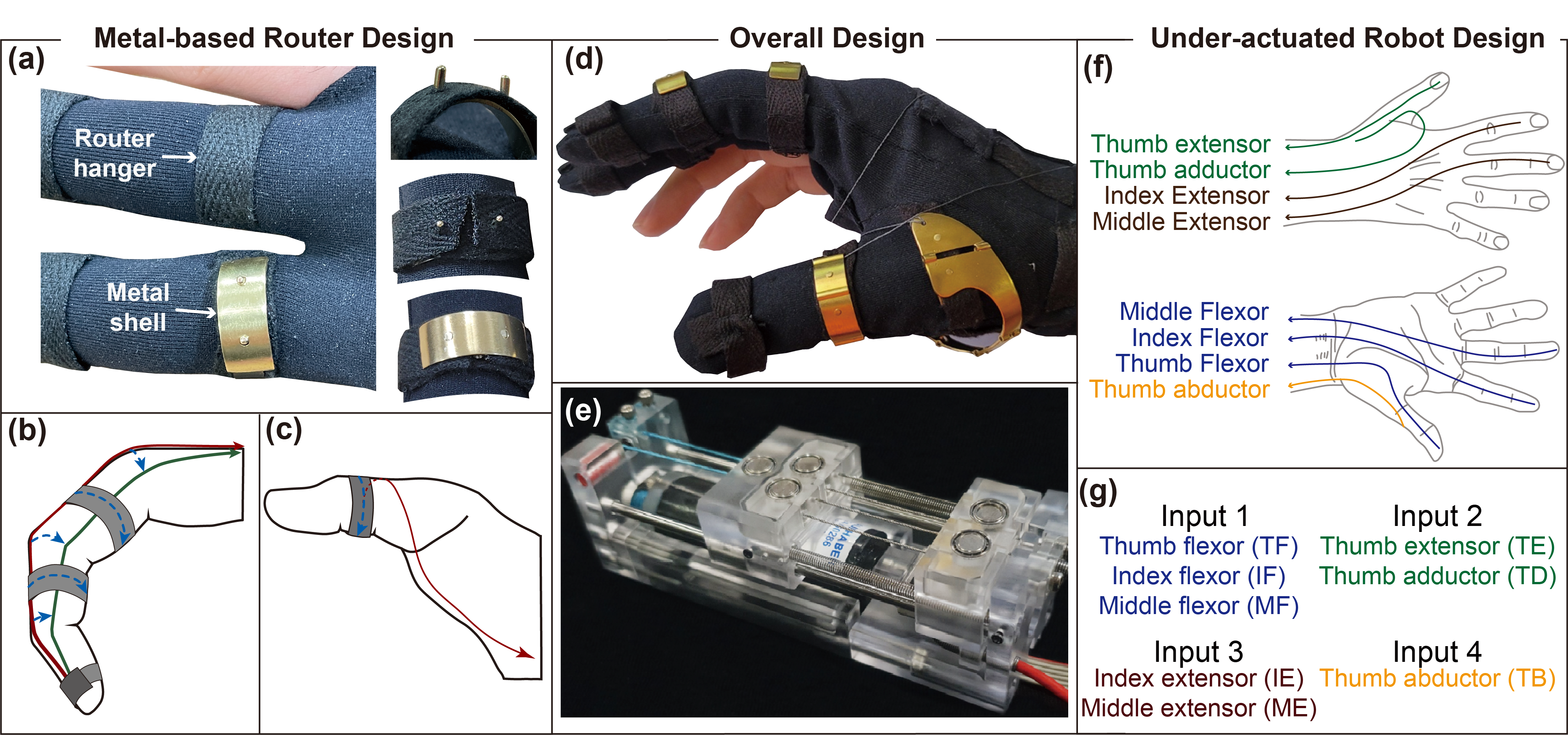
Main Figure: Two main design features of the Exo-Glove Shell: (a) - (d) show the proposed hybrid design that uses a soft garment and rigid metal rings; (e) - (g) show the under-actuated robot design, to assist three primitive motions with only four tendon-driven actuators (a) shows the fabrication process of the robot. The robot is fabricated by attaching metal routers, components to route the tendon, to the router hanger at the glove; (b) and (c) show possible problems that can occur when the robot is not fixed well to the user body; (d) shows the wearing part of the Exo-Glove Shell that was fabricated with both a soft garment and rigid metal ring; (e) shows the specifically designed actuator that enables the use of the under-actuation mechanism without complicating the robot wearing part;(f) shows how the tendons are routed along the glove to enable the desired motions; (g) shows how the tendons are pulled with fewer actuators.
As explained in the Hybrid wearable robot design page, in the wearable robot researches, the robot characteristics highly depend on the compliance of the robot component. For this reason, I have tried to use both rigid and soft component in designing the wearable robot; the robot design approach are described in this page. Details of the design approach of the Exo-Glove Shell will be updated after the publication of the paper.